
14_【Linux】七、进程间通信(一)
「前言」本文的大致内容是对进程间通信的基本介绍以及管道的介绍。
一、进程间通信介绍
1.1 进程间通信概念
进程间通信就是在不同进程之间传播或交换信息,进程间通信简称IPC(Interprocess communication)
1.2 为什么要有进程间通信
为什么要有进程间通信??
有时候我们是需要多进程协同的,去完成某种业务
1.3 进程间通信目的
- 数据传输:一个进程需要将它的数据发送给另一个进程
- 资源共享:多个进程之间共享同样的资源
- 通知事件:一个进程需要向另一个或一组进程发送消息,通知它(它们)发生了某种事件(如进程终止时要通知父进程)
- 进程控制:有些进程希望完全控制另一个进程的执行(如Debug进程),此时控制进程希望能够拦截另一个进程的所有陷入和异常,并能够及时知道它的状态改变
1.4 进程间通信分类
(1)管道
- 匿名管道
- 命名管道
(2)System V IPC
- System V 消息队列
- System V 共享内存
- System V 信号量
(3)POSIX IPC
- 消息队列
- 共享内存
- 信号量
- 互斥量
- 条件变量
- 读写锁
管道:管道是基于文件系统的。
System V IPC:聚焦在本地通信。POSIX IPC:让通信可以跨主机
1.5 进程间通信的本质
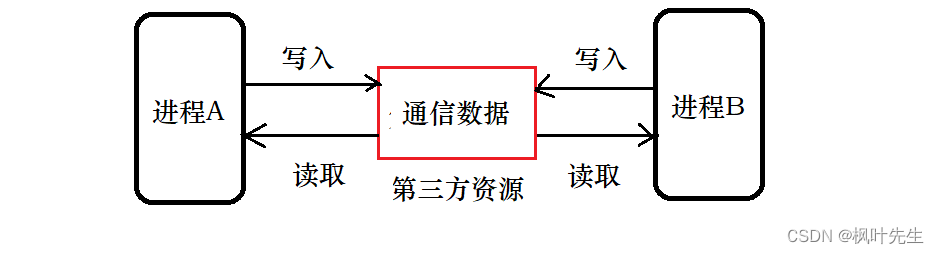
进程间通信的本质就是:让不同的进程看到同一份资源
两个进程间想要通信,就必须提供某一个资源,这个资源用于给两个进程之间进行通信。这个资源不能是进程的双方提供的,因为进程是具有独立性的,一个进程提供了资源,进行通信另一个进程必定会访问这个资源,这时就破坏了进程的独立性
因此,这个资源只能由第三方提供,这个第三方就是OS,OS需要直接或间接给通信双方的进程提供 “内存空间”
这个资源可以是OS中不同的模块提供,不同的模块提供的不同资源,造就了不同的通信种类(消息队列,共享内存,信号量...),因此出现了不同的通信方式
所以,进程间想要通信,首先要看到同一份资源,看到同一份资源才会有通信
二、管道
2.1 什么是管道
管道是Unix中最古老的进程间通信的形式,我们把从一个进程连接到另一个进程的一个数据流称为一个 “管道”
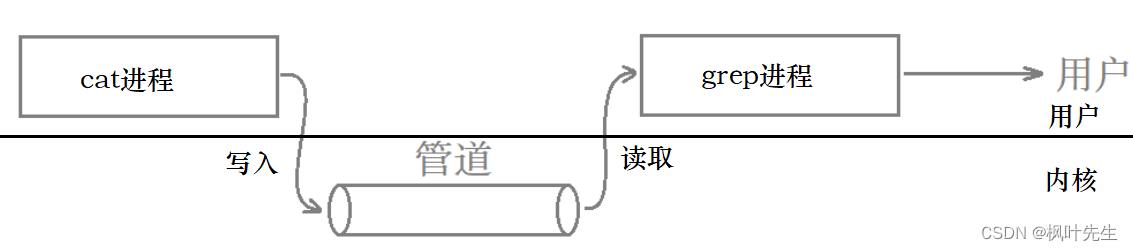
比如,我们执行的这条 cat file | grep hello 命令,其中 “|” 就是管道

其中,cat 命令和 grep 命令都是两个程序,当它们运行起来后就变成了两个进程,cat进程的数据传输到 “管道” 当中,grep进程再通过 “管道” 当中读取数据,至此便完成了数据的传输,两个进程就完成了通信
管道又分匿名管道和命名管道
2.2 匿名管道
匿名管道用于进程间通信,且仅限于本地父子进程之间通信
2.2.1 pipe函数
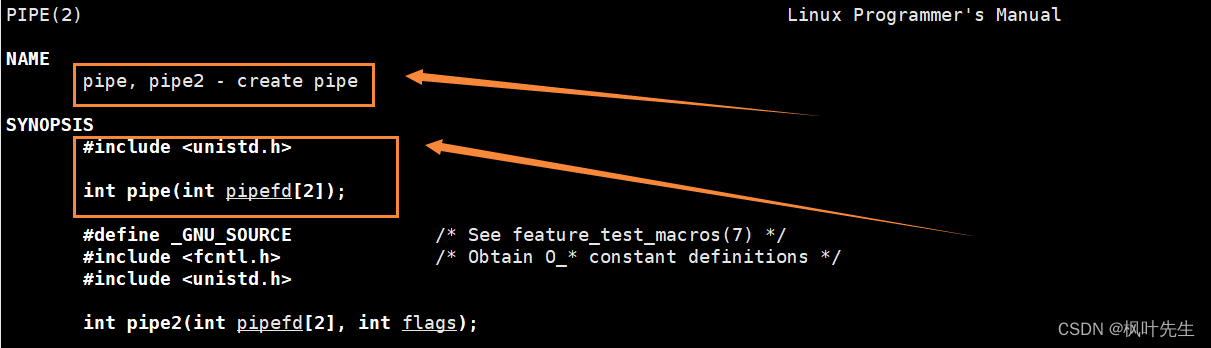
pipe函数用于创建匿名管道,man查看pipe,pipe函数是一个系统调用
man 2 pipe
pipe
头文件:#include <unistd.h>
函数原型
int pipe(int pipefd[2]);
返回值
成功时返回0,调用失败时返回-1且错误码被设置
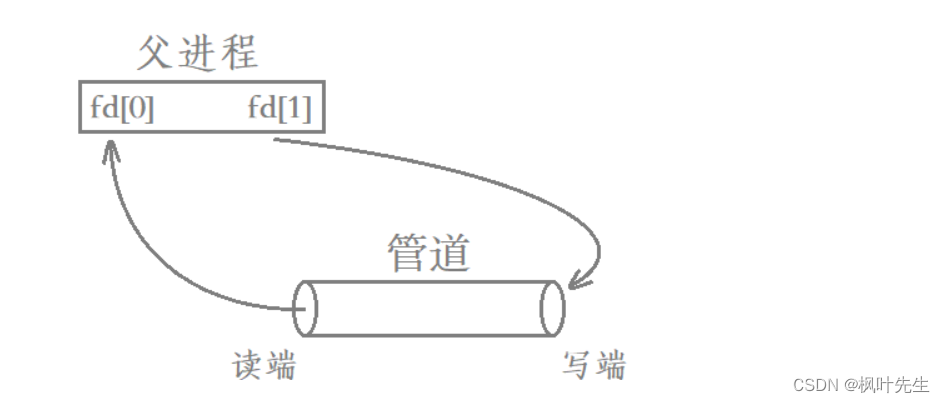
pipe函数的参数pipefd[2] 是一个输出型参数,数组pipefd用于返回两个指向管道读端和写端的文件描述符
pipefd[0]是管道读端的文件描述符pipef[1]是管道写端的文件描述符
帮助记忆:0可以想象成嘴(读),1可以想象成笔(写)

因为匿名管道仅用于父子进程间通信,所以要使用匿名管道就要使用fork函数
2.2.2 匿名管道的原理
匿名管道用于进程间通信,且仅限于本地父子进程之间通信
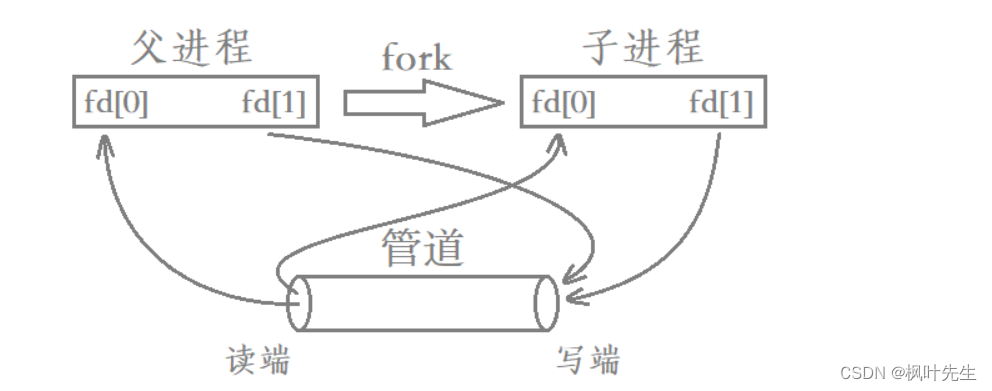
- 进程间通信的本质就是,让不同的进程看到同一份资源,使用匿名管道实现父子进程间通信的原理就是,让两个父子进程先看到同一份被打开的文件资源,然后父子进程就可以对该文件进行写入或是读取操作,进而实现父子进程间通信
- 该文件资源是文件系统提供的,该文件资源就是匿名管道,该文件资源的操作方法与文件一致,也有自己的文件缓冲区
注意:父子进程对该文件进行写入操作时,该文件缓冲区当中的数据不会发生写时拷贝,该文件资源由文件系统维护
2.2.3 匿名管道的使用
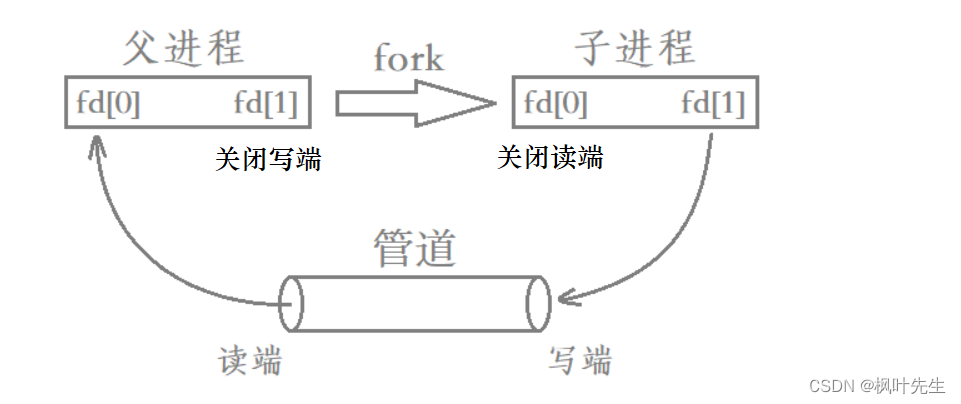
管道只能单向通信,不能双向通信
比如,一端是写入了,另一端就必须是读取,反过来也是,一端进行读取,另一端必须进行写入
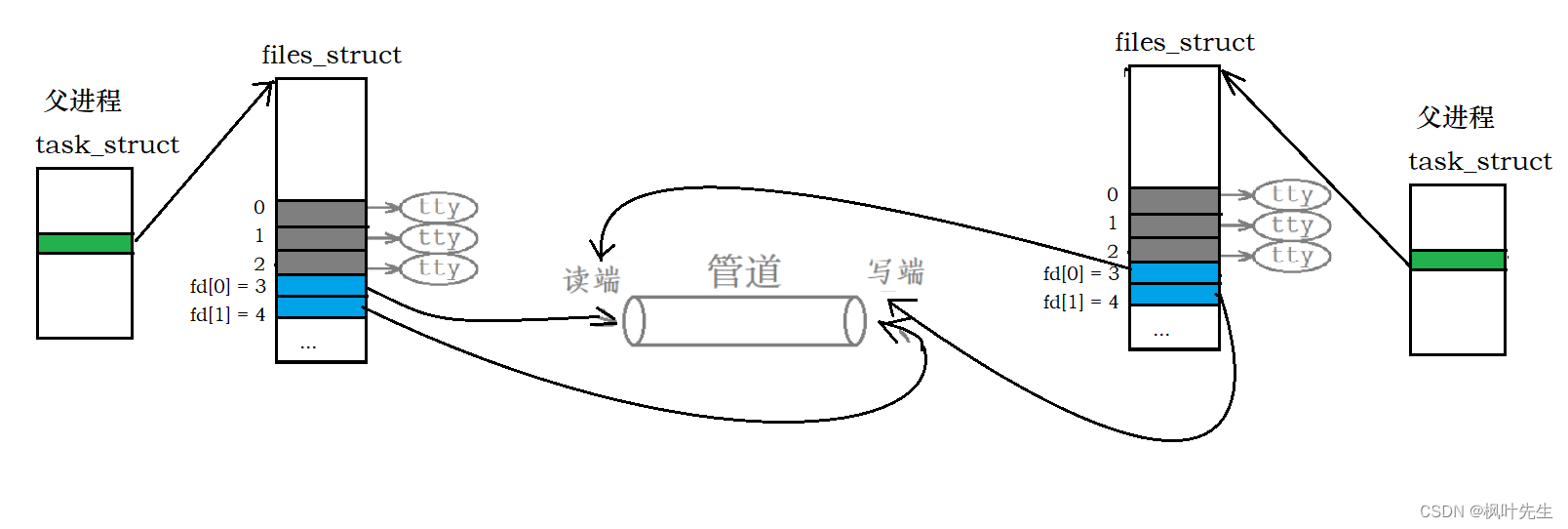
(1)父进程调用pipe函数创建管道
(2)父进程进行创建子进程
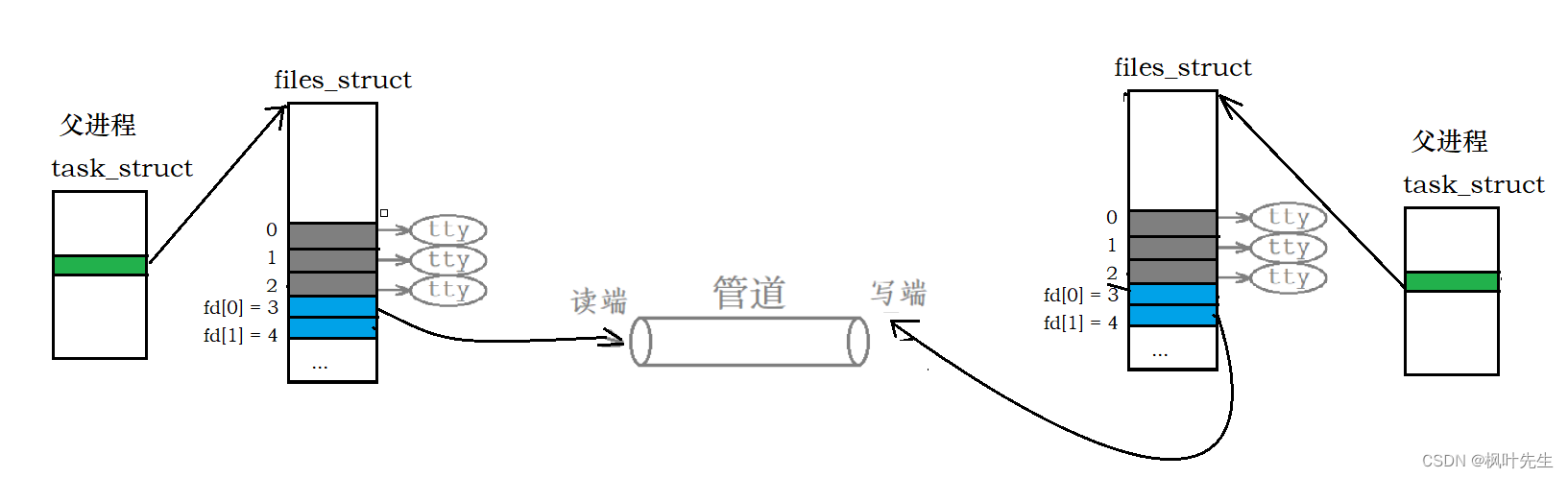
(3)父进程需要读取,父进程就需要关闭写端,子进程进行写入,子进程需要关闭读端
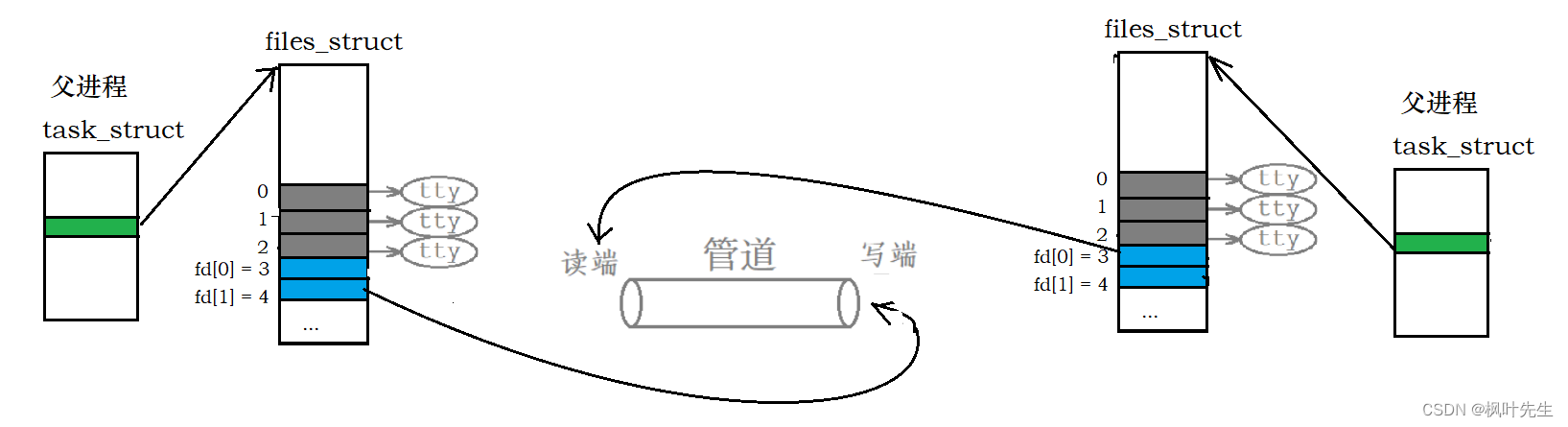
(4)父进程需要写入,父进程就需要关闭读端,子进程进行读取,子进程需要关写读端
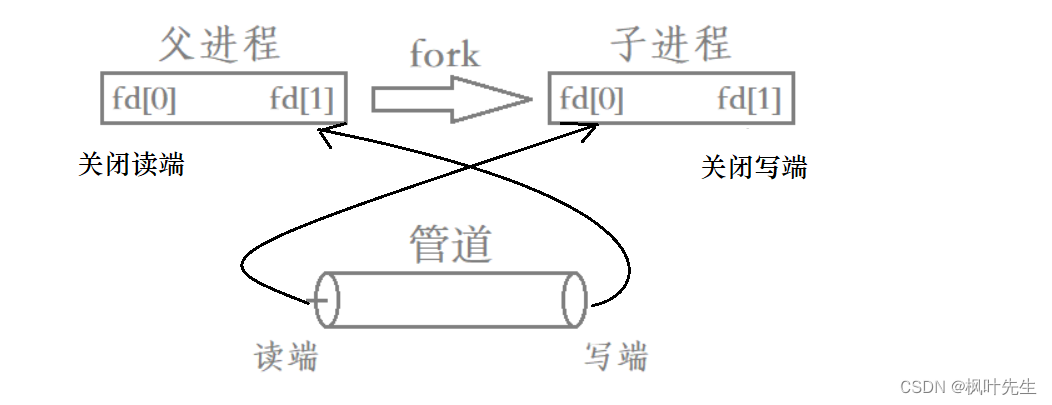
注意:管道是单向通信的
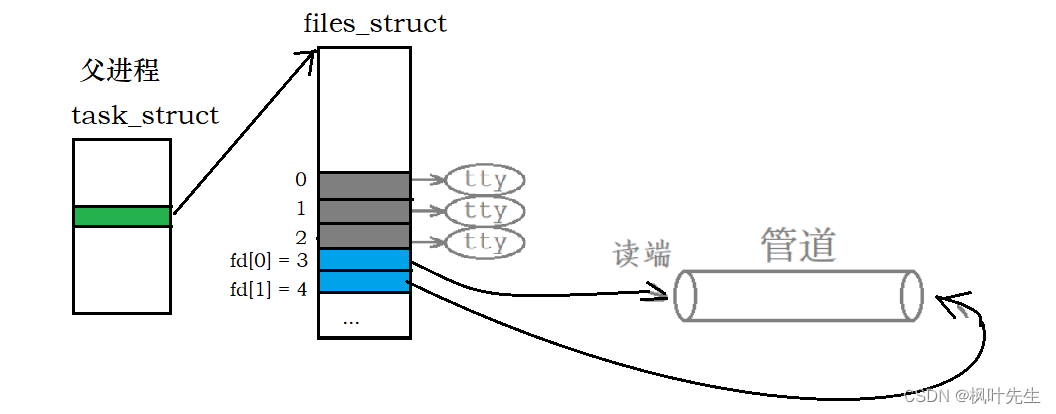
2.2.4 以文件描述符的角度看待
站在文件描述符的角度看待匿名管道:
(1)父进程调用pipe函数创建管道
(2)父进程进行创建子进程(右边是子进程,写错了)
(3)父进程需要读取,父进程就需要关闭写端,子进程进行写入,子进程需要关闭读端(右边是子进程,写错了)
(4)父进程需要写入,父进程就需要关闭读端,子进程进行读取,子进程需要关写读端(右边是子进程,写错了)
2.2.5 匿名管道测试代码
以子进程写入,父进程读取为例
#include <iostream>
#include <unistd.h>
#include <cstdio>
#include <cassert>
#include <cstring>
#include <sys/types.h>
#include <sys/wait.h>
using namespace std;
//子进程写入,父进程读取
int main()
{
// 第一步:创建管道文件,打开读写端
int fds[2];
int n = pipe(fds);
assert(n == 0);//否则创建管道失败,直接断言
//创建子进程
pid_t id = fork();
assert(id >= 0);//否则创建子进程失败
//子进程通信代码--子进程写入
if(id == 0)
{
//关闭读端,写端打开
close(fds[0]);
const char* s = "我是子进程,我正在给你发消息";
int cnt = 0;
while(true)
{
++cnt;
char buffer[1024];//只能在子进程看到
snprintf(buffer, sizeof buffer, "child -> parent say: %s[%d][子进程pid:%d]", s, cnt, getpid());
write(fds[1], buffer, strlen(buffer));
sleep(3);
if(cnt >= 10)
break;
}
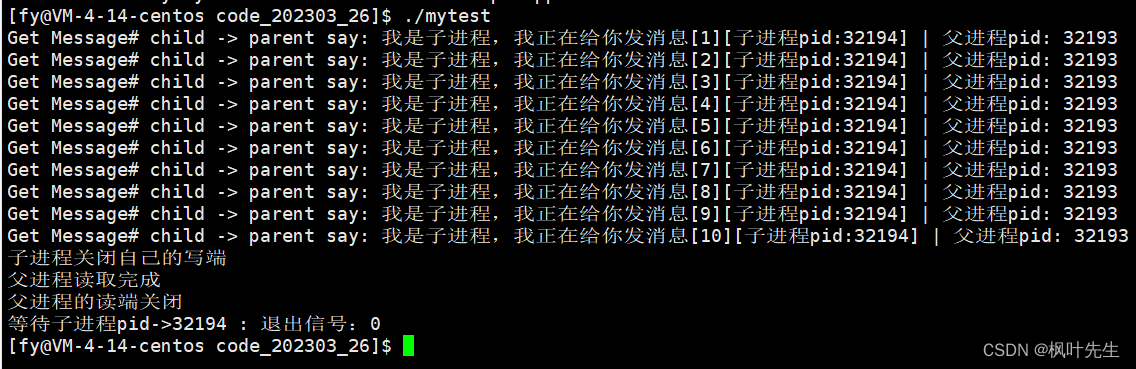
close(fds[1]);
cout << "子进程关闭自己的写端" << endl;
exit(0);
}
//父进程通信代码--父进程读取
close(fds[1]);
while(true)
{
sleep(1);
char buffer[1024];
ssize_t s = read(fds[0], buffer, sizeof(buffer)-1);
if(s > 0)//读取到数据
{
buffer[s] = '\0';//防止越界
cout << "Get Message# " << buffer << " | 父进程pid: " << getpid() << endl;
}
else if(s == 0) //读到文件结尾
{
cout << "父进程读取完成" << endl;
break;
}
}
close(fds[0]);
cout << "父进程的读端关闭" << endl;
//等待子进程
int status = 0;
n = waitpid(id, &status, 0);
cout << "等待子进程pid->" << n << " : 退出信号:" << (status & 0x7F) << endl;
return 0;
}
运行结果
2.2.6 匿名管道读写规则
- 读快,写慢。如果管道中没有数据,读端进程再进行读取,会阻塞当前正在读取的进程;如果写端不进行写入,读端进程会一直阻塞
- 读慢,写快。如果写端把管道写满了,再写就会对该进程进行阻塞,需要等待对方对管道内数据进行读取;如果读端不读取数据,写端进程会一直阻塞
- 写关闭,读取到0。如果写入进程关闭了写入
fd,读取端将管道内的数据读完后,程序结束 - **读关闭,写?**如果读关闭,操作系统会给写端发送13号信号
SIGPIPE,终止写端
(1)读快,写慢
上面代码是读快,写慢这种情况
(2)读慢,写快
修改代码,修改sleep时间即可
运行结果
(3)写关闭,读取到0
写入一条消息,直接关闭写端
运行结果
(4)读关闭,写?
读一次,直接把读端关闭
运行结果
2.2.7 匿名管道的特征
- 只能用于具有共同祖先的进程(具有亲缘关系的进程)之间进行通信;通常,一个管道由一个进程创建,然后该进程调用
fork,此后父、子进程之间就可应用该管道 - 管道提供流式服务(网络)
- 一般而言,进程退出,管道释放,所以管道的生命周期随进程
- 一般而言,内核会对管道操作进行同步与互斥(多线程)
- 管道是半双工的,数据只能向一个方向流动;需要双方通信时,需要建立起两个管道
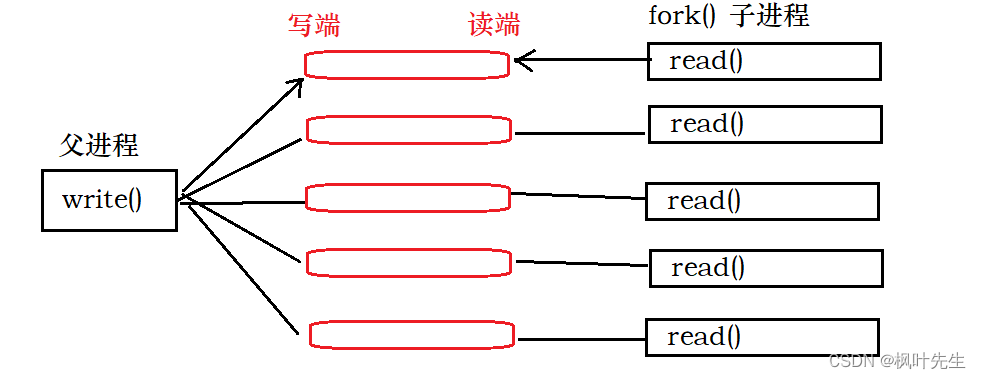
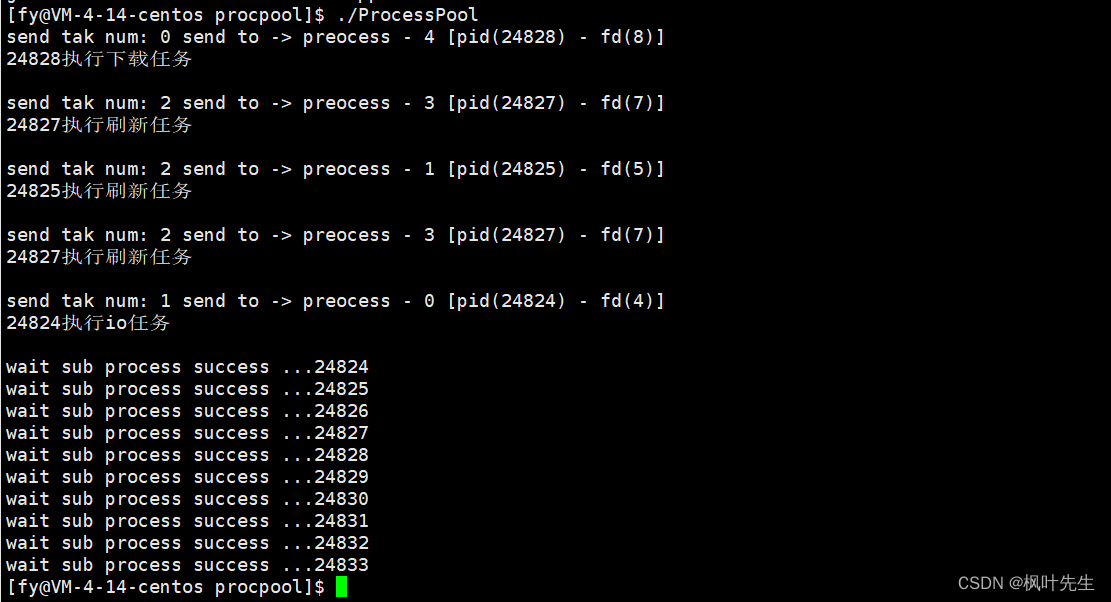
2.2.8 基于匿名管道的进程池
实现思路:父进程控制写端进行写入,子进程进行读取,读取命令码后执行相应的任务,父进程创建多个子进程
代码:
#include <iostream>
#include <string>
#include <vector>
#include <ctime>
#include <cassert>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
using namespace std;
#define makeSeed() srand((unsigned long)time(nullptr) ^ getpid() ^ 0x363 ^ rand() % 1234)
#define PROCESS_SUM 10
typedef void (*func_t)();//函数指针类型
//-------------------------------- 模拟一下子进程要完成的某种任务 ---------------------
void downloadTask()
{
cout << getpid() << "执行下载任务\n" << endl;
sleep(1);
}
void ioTask()
{
cout << getpid() << "执行io任务\n" << endl;
sleep(1);
}
void flushTask()
{
cout << getpid() << "执行刷新任务\n" << endl;
sleep(1);
}
void loadTaskFunc(vector<func_t>* out)
{
assert(out);
out->push_back(downloadTask);
out->push_back(ioTask);
out->push_back(flushTask);
}
//-------------------------------- 以下代码是多进程代码 ---------------------
class subEP //sub end point
{
public:
subEP(pid_t subId, int writeFd)
:_subId(subId)
,_writeFd(writeFd)
{
char nameBuffer[1024];
snprintf(nameBuffer, sizeof(nameBuffer), "preocess - %d [pid(%d) - fd(%d)]", _num++, _subId, _writeFd);
_name = nameBuffer;
}
public:
static int _num;
string _name;
pid_t _subId;
int _writeFd;
};
int subEP::_num = 0;
int recvTask(int readFd)
{
int code = 0;
ssize_t s = read(readFd, &code, sizeof code);
if(s == sizeof(code))//读取正常
{
return code;
}
else if(s <= 0)//读取出错
{
return -1;
}
else
{
return 0;
}
}
void createSubProcess(vector<subEP>* subs, vector<func_t>& funcMap)
{
//vector<int> deleteFd;//第一种方法:解决下一个子进程拷贝父进程读写端的问题
for(int i = 0; i < PROCESS_SUM; i++)
{
int fds[2];
int n = pipe(fds);
assert(n == 0);
(void)n;
pid_t id = fork();
//子进程
if(id == 0)
{
// for(int i = 0; i < deleteFd.size(); i++)
// close(deleteFd[i]);
close(fds[1]);
while(true)
{
//1.获取父进程发送的命令码,没有收到命令码,进行阻塞等待
int commandCode = recvTask(fds[0]);
//2.执行任务
if(commandCode >= 0 && commandCode < funcMap.size())
{
funcMap[commandCode]();
}
else if(commandCode == -1)//读取失败返回-1
{
break;
}
}
//子进程退出
exit(0);
}
//父进程
close(fds[0]);
subEP sub(id, fds[1]);
subs->push_back(sub);//
//deleteFd.push_back(fds[1]);
}
}
void sendTask(const subEP& process, int taskNum)
{
cout << "send tak num: " << taskNum << " send to -> " << process._name << endl;
int n = write(process._writeFd, &taskNum, sizeof(taskNum));
assert(n == sizeof(int));
(void)n;
}
void loadBlanceContrl(vector<subEP>& subs, vector<func_t>& funcMap, int count)
{
int processSum = subs.size();
int taskSum = funcMap.size();
bool forever = (count == 0 ? true : false);
while(true)
{
// 1. 随机选择一个子进程
int subIdx = rand() % processSum;
// 2. 随机选择一个任务
int taskIdx = rand() % taskSum;
// 3. 任务发送给选择的进程
sendTask(subs[subIdx], taskIdx);
sleep(1);
if(!forever)
{
count--;
if(count == 0)
break;
}
}
//第二种方法:解决下一个子进程拷贝父进程读写端的问题
//写端退出,关闭读
for(int i = 0; i < processSum; i++)
{
close(subs[i]._writeFd);
}
}
void waitProcess(vector<subEP> process)
{
int processSum = process.size();
for(int i = 0; i < processSum; i++)
{
waitpid(process[i]._subId, nullptr, 0);
cout << "wait sub process success ..." << process[i]._subId << endl;
}
}
int main()
{
//创建随机数
makeSeed();
// 1.建立子进程并建立和子进程通信的信道
// 1.1 加载方法任务表
vector<func_t> funcMap;
loadTaskFunc(&funcMap);
// 1.2 创建子进程,并且维护父子通信信道
vector<subEP> subs;
createSubProcess(&subs, funcMap);
// 2.父进程,控制子进程,负载均衡的向子进程发送命令码
int taskCnt = 5;//执行任务次数,为0时永远执行任务
loadBlanceContrl(subs, funcMap, taskCnt);
// 3.回收子进程
waitProcess(subs);
return 0;
}
运行结果
小提示:以 .cpp .cxx .cc 结尾的都是C++的源文件
2.3 命名管道
匿名管道只能用于具有共同祖先的进程(具有亲缘关系的进程)之间的通信,通常,一个管道由一个进程创建,然后该进程调用fork创建子进程,父子进程通过匿名管道进行通信。如果要实现两个毫不相关进程之间的通信,可以使用命名管道来做到
2.3.1 使用命令创建命名管道
使用 mkfifo 命令创建一个命名管道

mkfifo 文件名
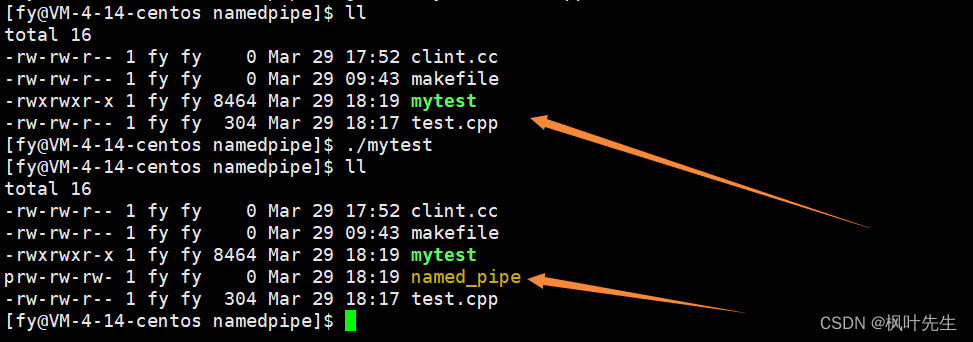
ps: mkfifo named_pipe
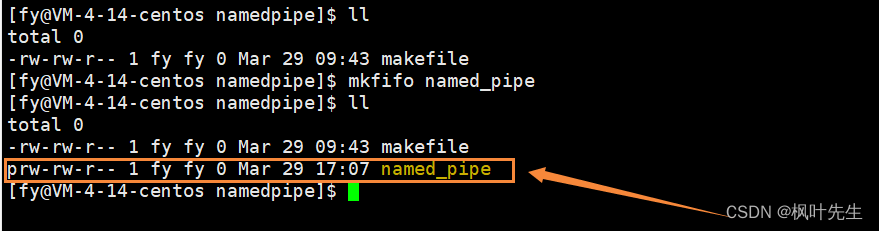
可以看到,创建出来的文件的类型是 p ,代表该文件是命名管道文件
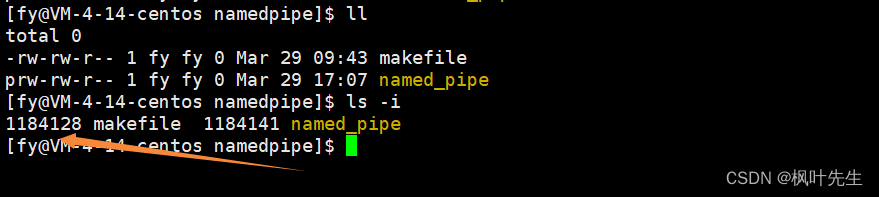
命名管道也有自己的 inode,说明命名管道就是一个独立的文件
使用这个命名管道文件,就能实现两个进程之间的通信了。我们在一个进程(进程A)中用shell脚本每秒向命名管道写入一个字符串,在另一个进程(进程B)当中用 cat命令从命名管道当中进行读取
现象:当进程A启动后,进程B会每秒从命名管道中读取一个字符串打印到显示器上
这就证明了这两个毫不相关的进程可以通过命名管道进行数据传输,即通信
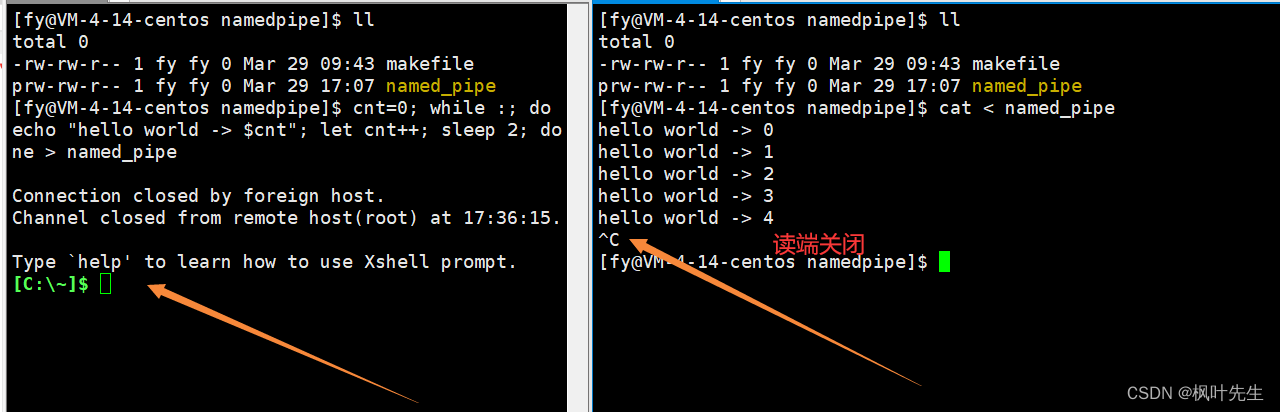
先测试往显示器上打印 (shell脚本语言)
cnt=0; while :; do echo "hello world -> $cnt"; let cnt++; sleep 2; done
运行结果
输出重定向到管道里
cnt=0; while :; do echo "hello world -> $cnt"; let cnt++; sleep 2; done > named_pipe
注:脚本语言是一个进程,cat也是一个进程,两个进程毫无关系
cat进行输入重定向 ,向管道named\_pipe读取数据
cat < named_pipe
运行结果
之前我们说过,当管道的读端进程退出后,写端进程再向管道写入数据就没有意义了,此时写端进程会被操作系统杀掉,在这里就可以很好的得到验证:当我们终止掉读端进程后,因为写端执行的循环脚本是由命令行解释器bash执行的,所以此时bash就会被操作系统杀掉,我们的云服务器也就退出了
注意:命名管道的大小是不会改变的,都为0,因为数据都是在文件缓冲区
2.3.2 命名管道的原理
命令管道用于实现两个毫不相关进程之间的通信
- 进程间通信的本质就是,让不同的进程看到同一份资源,使用命名管道实现进程间通信的原理是:也是让两个进程先看到同一份被打开的文件资源,这个文件资源就是我们创建的命名管道
- 两个毫不相关进程打开了同一个命名管道,此时这两个进程也就看到了同一份资源,进而就可以进行通信了,通信的数据依旧是在文件缓冲区里面,并且不会刷新到磁盘
- 命名管道可以通过路径+名字标定唯一性,匿名管道是通过地址来标定唯一性的,这个地址没有名字,所以叫匿名管道
2.3.3 在程序中创建命名管道
在程序中创建命名管道使用也是使用mkfifo,mkfifo是命令,也是一个函数
man 3 mkfifo查看一下
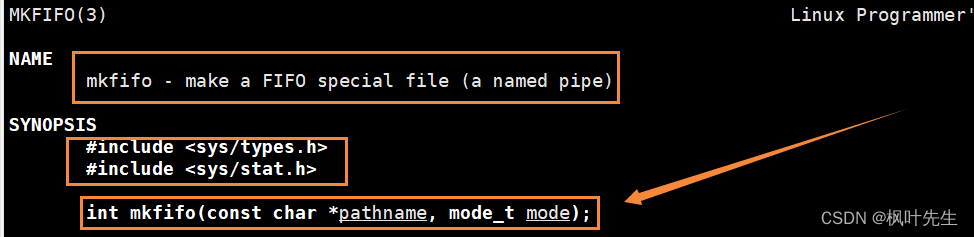
mkfifo函数的函数原型如下:
int mkfifo(const char *pathname, mode_t mode);
解释:
头文件:
#include <sys/types.h>
#include <sys/stat.h>
声明:
int mkfifo(const char *pathname, mode_t mode);
参数:
(1)pathname
mkfifo函数的第一个参数是pathname,表示要创建的命名管道文件
注意:
若pathname以路径的方式给出,则将命名管道文件创建在pathname路径下
若pathname以文件名的方式给出,则将命名管道文件默认创建在当前路径下
(2)mode
mkfifo函数的第二个参数是mode,表示创建命名管道文件的默认权限
返回值:
命名管道创建成功,返回0
命名管道创建失败,返回-1,错误码被设置
注意:若想创建出来命名管道文件的权限值不受影响,则需要在创建文件前使用 umask函数将文件默认掩码设置为0
代码示例:
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FILE_NAME "named_pipe"
int main()
{
umask(0); //将文件默认掩码设置为0
//使用mkfifo创建命名管道文件
int n = mkfifo(FILE_NAME, 0666);
if (n < 0)
{
perror("mkfifo");
return -1;
}
return 0;
}
运行结果
2.3.4 unlink函数
上面的程序再次运行就会报错
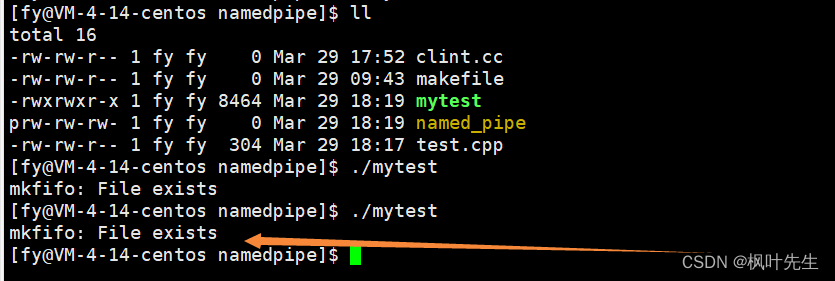
这是因为mkfifo函数创建管道是,如果管道已经存在,就不会创建,直接报错:文件已经存在
如果我们想让程序运行结束,创建的管道也被删除,就要使用unlink函数
man 3 unlink 查看一下
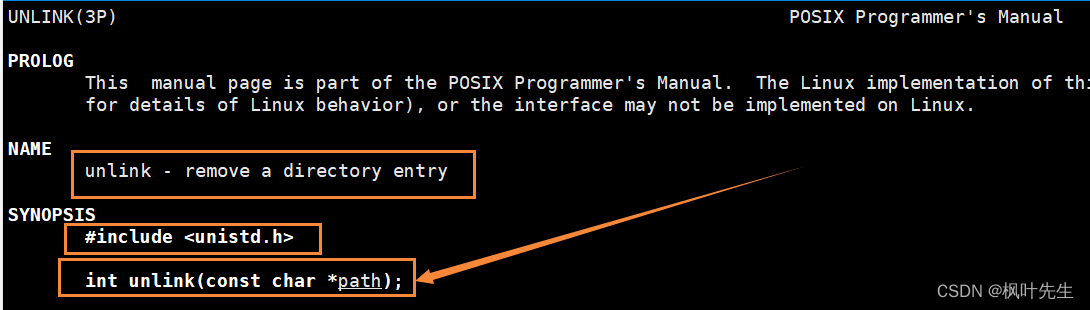
unlink
头文件:
#include <unistd.h>
函数声明:
int unlink(const char *path);
参数:
传入要被删除文件的名字
返回值:
删除成功返回 0
失败返回 -1 ,错误码被设置
测试代码
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FILE_NAME "named_pipe"
int main()
{
umask(0); //将文件默认掩码设置为0
//使用mkfifo创建命名管道文件
int n = mkfifo(FILE_NAME, 0666);
if (n < 0)
{
perror("mkfifo");
return -1;
}
//删除管道文件
n = unlink(FILE_NAME);
if(n < 0)
{
perror("unlink");
return -1;
}
else
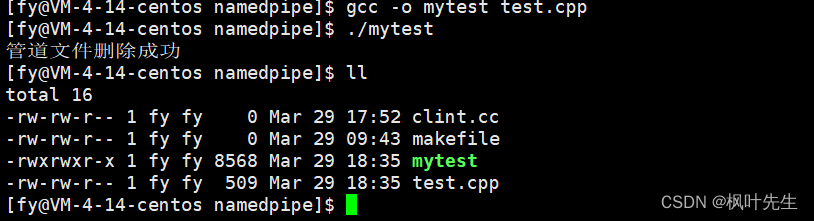
{
printf("管道文件删除成功\n");
}
return 0;
}
运行结果
小提示:
assert不要乱使用,意料之中使用assert,意料之外使用if判断
2.3.5 使用命名管道实现serve&client通信
实现服务端(server)和客户端(client)之间的通信之前,我们需要先让服务端运行起来,我们需要让服务端运行后创建一个命名管道文件,然后再以读的方式打开该命名管道文件,之后服务端就可以从该命名管道当中读取客户端发来的通信信息了
共同的头文件:comm.hpp
客户端和服务端共用一个头文件
#pragma once
#include <iostream>
#include <string>
#include <sys/types.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include <cassert>
#include <cstring>
using namespace std;
#define NAMED_PIPE "named_pipe"
//创建命名管道
bool createFifo(const string& path)
{
umask(0);
int n = mkfifo(path.c_str(), 0600);
if(n == 0)//创建成功
{
return true;
}
else//创建失败
{
cout << "errno: " << "errno string: " << strerror(errno) << endl;
return false;
}
}
//删除命名管道
void removeFifo(const string& path)
{
int n = unlink(path.c_str());
assert(n == 0);//release下就没有了
(void)n;
}
服务端的代码如下:(server.cc)
#include "comm.hpp"
int main()
{
//创建命名管道
bool r = createFifo(NAMED_PIPE);
assert(r);
(void)r;
cout << "server begin" << endl;
int rfd = open(NAMED_PIPE, O_RDONLY);//打开命名管道,服务端以读方式打开
if(rfd < 0)
exit(-1);
//read
char buffer[1024];
while(true)
{
ssize_t s = read(rfd, buffer, sizeof(buffer) - 1);
if(s > 0)//读取正常
{
buffer[s] = '\0';
cout << "client -> server# " << buffer << endl;
}
else if(s == 0)//client退出,server也退出
{
cout << "client quit, me too!" << endl;
break;
}
else//读取错误
{
cout << "error string: " << strerror(errno) << endl;
break;
}
}
//关闭文件描述符
close(rfd);
//程序退出删除命名管道
removeFifo(NAMED_PIPE);
cout << "server end" << endl;
return 0;
}
服务端代码:(client.cc)
#include "comm.hpp"
int main()
{
cout << "client begin" << endl;
int wfd = open(NAMED_PIPE, O_WRONLY);//打开命名管道,客户端以写的方式打开
if(wfd < 0)
exit(-1);
//write
char buffer[1024];
while(true)
{
cout << "Please Say# ";
fgets(buffer, sizeof(buffer), stdin);//输入信息
if(strlen(buffer) > 0)
buffer[strlen(buffer) - 1] = 0;//去掉输入多余的 \n
ssize_t n = write(wfd, buffer, strlen(buffer));
assert(n == strlen(buffer));
(void)n;
}
close(wfd);
cout << "client end" << endl;
return 0;
}
运行的时候,服务端先运行,然后客户端再运行,客户端不输入数据,服务端会一直阻塞等待
2.3.6 匿名管道与命名管道的区别
- 匿名管道由pipe函数创建并打开。
- 命名管道由mkfifo函数创建,打开用open
- FIFO(命名管道)与pipe(匿名管道)之间唯一的区别在它们创建与打开的方式不同,一但这些工作完成之后,它们具有相同的语义
--------------- END ---------------
「 作者 」 枫叶先生
「 更新 」 2023.3.29
「 声明 」 余之才疏学浅,故所撰文疏漏难免,
或有谬误或不准确之处,敬请读者批评指正。
14_【Linux】七、进程间通信(一)
http://114.132.213.38:6250/archives/eee845b3-13d3-43b5-9625-eb8c60e375af
评论