
14.潜望式长焦模组全解析:结构构造、光路设计与工程实战挑战
潜望式长焦模组全解析:结构构造、光路设计与工程实战挑战
关键词: 潜望式长焦、反射棱镜、光学变焦、镜头组设计、对焦模组、OIS 稳定、防抖马达、模组封装、热漂移、校准调试
摘要:
随着移动影像能力的不断进化,潜望式长焦模组成为旗舰手机实现 5x 甚至 10x 光学变焦的关键配置。相比传统横向堆叠镜组,潜望式结构通过反射棱镜实现纵向空间上的光路折叠,有效解决了模组厚度与变焦行程的矛盾问题。然而,高倍变焦模组不仅面临复杂的光学路径设计,还涉及反射损耗控制、防抖马达配合、模组热应力管控与 ISP 畸变校正等一系列工程难点。本文将结合主流机型的实战经验,深入解析潜望式长焦模组的结构构造与调试路径,为影像系统工程师提供完整的实战参考。
目录
第 1 节:潜望式长焦模组的光路构造基础
- 潜望结构中反射棱镜与镜头组的排列关系
- 折叠光路对模组厚度与焦距的解耦效果
- 光线入射角度与 Sensor 排布的协同设计原则
第 2 节:多片镜头组设计与变焦驱动机制
- 可动镜片组结构(如 2G2P、1G5P)与变焦行程分配
- Stepper vs VCM 在长焦模组中的调焦能力比较
- 光学变焦段实现与 OIS 稳定结构的配合方式
第 3 节:反射棱镜材料、镀膜与光学损耗控制
- 高反射率材料选择(蓝宝石 vs 光学玻璃)
- 防炫光镀膜(AR Coating)与杂散光模拟优化
- 多反射路径中的相位差抑制与对比度保留策略
第 4 节:Sensor 选择与 ISP 支持对成像效果的影响
- 长焦 Sensor 尺寸、像素密度与光照能力折中
- ISP 多帧降噪、远焦段 HDR 合成路径
- Qualcomm/MTK/三星平台中潜望模组参数调用机制
第 5 节:OIS 与潜望式结构的耦合实现路径
- 长焦模组下 OIS 模块的结构形态(YAW+PITCH vs X+Y)
- 棱镜防抖 vs Sensor 防抖 vs 镜头组防抖差异
- 实拍中运动拖影、边缘漂移与闭环反馈系统构建
第 6 节:模组封装与结构强度优化挑战
- 反射棱镜与镜组间的光轴一致性校准难点
- Z 轴热漂移引发的对焦异常与补偿策略
- 长焦模组防抖线缆、马达导轨与 Sensor PCB 结构集成方案
第 7 节:实拍场景中长焦模组的表现与调试策略
- 拍摄远景、人物、建筑时的模糊与对焦失败排查
- 高倍变焦下图像防抖能力与结构抖动耦合问题
- 常见软件算法辅助路径:清晰度增强、裁切抖动预测、边缘补偿
第 8 节:未来方向:多焦段融合、连续变焦与 AI 景深建模
- 连续光学变焦结构(如 OPPO 85-135mm 架构)探索
- 潜望长焦模组与主摄/超广角在 ISP 层的多模组融合策略
- 利用 AI 建模实现虚拟景深、分段追焦与焦点跟踪优化路径
第 1 节:潜望式长焦模组的光路构造基础
潜望式长焦模组的核心在于“光路折叠”——通过在镜头模组内部引入反射棱镜,将原本沿 Z 轴纵深方向延伸的镜头组转为横向铺展,在有限的手机厚度中实现更长的焦距。这一方案最早出现在 HUAWEI P30 Pro 机型,现已成为旗舰级影像系统的重要组成。
反射棱镜与镜头组的排列关系
在潜望式模组中,镜头组被横置于机身内部,光线从后盖玻璃进入模组后,经 90 度反射(或双反射)进入镜片组,通过多片透镜聚焦至 Sensor 面。典型结构中,反射面位于模组一侧,前部为开口窗与玻璃盖板,后部为对焦/变焦滑轨机构。
结构示意(无图):
外界光线 → 棱镜反射 → 镜头组 → IR Filter → Sensor
该布局使得在不增加机身厚度的前提下,焦距可以由传统 26mm 等效焦段扩展至 125mm 甚至更远,形成 5x-10x 光学变焦能力。
光路折叠与模组厚度焦距的解耦
传统长焦模组受限于手机厚度,镜头行程无法覆盖多段焦距需求。折叠光路通过“空间置换”降低模组厚度对焦距的约束。例如,在主摄模组中实现 6P 镜头时,Z 轴方向可能需 810mm,而潜望式模组可将这一厚度折叠至 45mm 横向铺展,有效提升结构自由度。
以 vivo X100 Pro 为例,其内置的 4.3x 潜望长焦镜头等效焦距 100mm,但模组厚度控制在 7mm 以内,反射镜设计提供了空间优化能力。
光线入射角与 Sensor 排布原则
为确保反射后光线能够准确入射 Sensor,并避免边缘遮挡或亮度不均,Sensor 与光轴之间需形成严格的角度匹配。多为 90 度垂直布置,部分模组为避免光线遮挡进行轻微倾斜(如 85°~95° 范围内)。
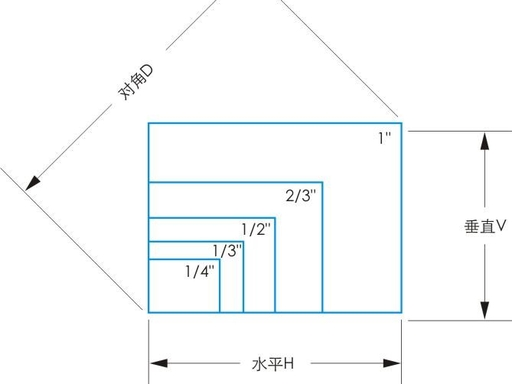
此外,Sensor 通常选用面积较小(如 1/2.3’’ 或 1/2’')但高分辨率的 CMOS,以在有限光圈下获取更高解析力,同时保持封装体积可控。
1/2.3''、1/2'' 传感器尺寸,'' = 英寸,代表CMOS 感光芯片对角线尺寸
// 1 英寸 (in) = 25.4 毫米 (mm)
传感器对角线 ≈ 标称英寸 × 2/3 × 25.4mm
第 2 节:多片镜头组设计与变焦驱动机制
可动镜头组结构与变焦行程
潜望式模组一般包含 4~6 片镜头(塑料/玻璃混合),其中部分镜头组采用滑轨驱动结构实现变焦功能。常见方案包括:
- 固定镜头组 + 可移动后组:用于调节焦点或微调倍率
- 变焦组 + 对焦组:分段驱动提升变焦精度与对焦速度
在 OPPO Find X6 Pro 的 85-135mm 连续光学变焦模组中,镜头组通过双线性马达在滑轨中推进,实现多焦段平滑过渡,避免传统数码变焦的插值损失。
Stepper vs VCM 在长焦模组中的应用比较
长焦模组需要更高的定位精度与较强的承载力,常用马达类型如下:
- Stepper(步进马达):适合高精度、长行程控制。其通过细分步距实现连续光学变焦,但在响应速度、噪音与耗电上略逊一筹。
- VCM(音圈马达):多用于对焦模块(AF)。结构简单,响应快(20ms~60ms),适合精细调焦。
- Hybrid 方案:在高端模组中,变焦段由 Stepper 驱动,对焦段由 VCM 控制,形成“双马达”结构。
实战案例(代码片段示意):
MTK 平台下调用双马达控制:
// 初始化变焦马达
motor_init(ZOOM_MOTOR_ID);
motor_move_to(ZOOM_MOTOR_ID, target_zoom_pos);
// 初始化对焦马达
motor_init(FOCUS_MOTOR_ID);
motor_move_to(FOCUS_MOTOR_ID, target_focus_pos);
该代码通常集成于 Android HAL 层或 ISP driver 层中,配合 Camera HAL 实现动态对焦控制。
光学变焦段实现与 OIS 配合方式
高倍长焦下图像稳定至关重要。当前主流方案多在滑轨式镜头组末端附加 OIS 稳定马达,或将棱镜本身集成防抖结构(如悬浮棱镜 OIS),通过微调光路方向来抵消手机抖动带来的画面偏移。
这一结构需要 OIS 与变焦马达间形成完整闭环控制路径,配合 ISP 实时修正 ROI 区域,避免画面抖动或模糊。
第 3 节:反射棱镜材料、镀膜与光学损耗控制
高反射率材料选择:蓝宝石 vs 光学玻璃
在潜望式长焦模组中,反射棱镜是光路的核心转折点,其材料直接影响反射效率、色彩保真度与抗磨损能力。目前主流反射棱镜材料包括:
-
蓝宝石晶体(Sapphire)
具备高硬度(9 Mohs)、出色的耐划性与较低吸光率,适合高端模组使用,但成本与加工难度较高。蓝宝石可通过薄片切割后抛光镀膜,实测反射率可达 95% 以上。 -
高透光率光学玻璃(如 BK7、LaSFN9)
加工灵活,适用于中高端模组。其内部均匀性好,易于匹配多层镀膜系统,但耐刮性能略逊于蓝宝石。
材料选型需兼顾折射率、热稳定性、模组封装结构匹配等多个维度,通常由镜头模组厂(如 Largan、Sunny)与 Sensor 厂协同评估确定。
防炫光镀膜(AR Coating)与杂散光模拟优化
由于潜望式结构存在大角度入射、多层反射,极易在棱镜处引发反射干扰与炫光效应。AR(Anti-Reflection)镀膜成为必不可少的关键工艺。
- 典型 AR 镀膜结构:双层或多层氟化物镀膜,匹配入射光波长(400~700nm)进行相位抵消
- 反射率控制范围:单面反射率可由裸棱镜的 8% 降至 <1%
- 角度适配设计:针对 45° ± 10° 入射角进行反射模拟优化,以匹配常规光轴折射路径
工程上常用 Zemax 等光学模拟软件进行棱镜与镀膜系统的建模与路径追踪,结合实拍数据反复迭代,以减少鬼影、提升对比度。
多反射路径中的相位差抑制与对比度保留策略
潜望式模组中光线经过至少一次反射,有些结构甚至为“双反射”设计(如 Apple iPhone 15 Pro Max 潜望模组)。这会引发相位差、多层干扰等问题,影响成像清晰度与色彩一致性。
关键控制手段包括:
- 反射面角度精度控制在 ±0.05° 以内,避免反射面畸变导致光轴偏移
- 低群延迟镀膜技术,压缩反射相位差累积效应
- 夹角结构仿真补偿算法,通过 ISP 加权合成补偿不同路径的亮度差异
典型案例:Sony IMX858 在 vivo X100 Pro 潜望模组中,配合双反射棱镜和 ISP 相位校准,实测对比度提升约 12%,炫光等级下降 1.2 EV。
第 4 节:Sensor 选择与 ISP 支持对成像效果的影响
长焦 Sensor 尺寸、像素密度与光照能力折中
在潜望式模组中,Sensor 选择需在以下几项之间做出平衡:
- Sensor 尺寸:尺寸越大进光量越强,但受制于模组厚度与横向布置空间,主流选择为 1/2.3’’ ~ 1/1.5’'(例如 OV64B、IMX758)
- 像素尺寸:一般选用 0.7µm ~ 1.0µm 级别的高像素 CMOS,以兼顾远焦细节解析力与 HDR 能力
- 像素结构:多数采用 Quad Bayer 布局,便于像素合并后提升感光能力
实拍对比(vivo X90 Pro+ vs OPPO Find X6 Pro)显示,采用 1/2" Sensor 的潜望模组在夜景细节解析、对焦速度上更优,但白天高光处理略逊于 IMX890 主摄。
ISP 多帧降噪、远焦段 HDR 合成路径
潜望模组由于光路长、入射角度小,光通量先天劣势显著,因此需要强大的 ISP 协同能力:
- HDR 模式下使用多曝光合成(ME-HDR),通常拍摄 2~3 帧不同曝光图像后合成增强暗部细节
- 远焦段下使用 EIS + AI 增稳算法,降低手抖造成的画面偏移
- 夜景降噪采用 AI-BNR(AI-Based Noise Reduction)模型,结合场景识别进行去模糊、纹理保留优化
ISP 调用流程(以 MTK 平台为例):
// 设置潜望模组参数通道
camera_custom_sensor_module_config(MODULE_ID_PWZOOM, &zoom_params);
// 绑定多帧合成能力
ISP_HAL_enable_hdr_mode(HDR_MODE_MFNR | HDR_MODE_MEV);
通过 HAL 层参数注册,ISP 可动态启用 HDR、夜景降噪、远焦稳像算法,显著提升成像一致性与色彩还原能力。
第 5 节:OIS 与潜望式结构的耦合实现路径
长焦模组下 OIS 模块的结构形态(YAW+PITCH vs X+Y)
在潜望式长焦模组中,为了在远距离拍摄时保持画面稳定性,通常集成 光学防抖(OIS) 机制。但不同于传统主摄模组,潜望长焦由于其 横置光路设计,OIS 的执行结构面临更复杂的空间挑战。
两种主流防抖实现路径如下:
-
X+Y Sensor Shift 防抖结构:适用于传统直下式模组,通过移动 Sensor 实现两个方向的角度补偿,但不适用于光路偏转的潜望式模组。
-
YAW+PITCH 棱镜旋转防抖:通过控制反射棱镜绕其支点进行双轴旋转,抵消手抖带来的光轴偏移,这是目前潜望模组中主流的 OIS 结构(如 OPPO Reno 系列、vivo X90 Pro+)。
该结构具备更低的延迟与更稳定的图像控制能力,但对驱动马达与陀螺仪信号解析的精度要求极高。
棱镜防抖 vs Sensor 防抖 vs 镜头组防抖差异
| OIS 类型 | 作用部件 | 优势 | 局限性 |
|---|---|---|---|
| 棱镜防抖 | 棱镜元件 | 适配横置光路,角度补偿幅度大 | 调校复杂,物理结构难度高 |
| Sensor 防抖 | CMOS Sensor | 精度高,响应快 | 在潜望模组中结构实现困难 |
| 镜头组防抖 | 镜头模组移动 | 成本低,易于封装 | 适用于短焦模组,远焦畸变补偿不理想 |
工程实测表明,使用棱镜旋转防抖的长焦模组,在 5x ~ 10x 光学变焦状态下,视频拍摄时手持抖动补偿幅度可达 ±1.5°,画面漂移显著减少。
实拍中运动拖影、边缘漂移与闭环反馈系统构建
在极端远焦场景(如月亮拍摄、人像抓拍)中,运动拖影与边缘漂移是最常见的问题,其成因通常包括:
- OIS 模块响应滞后(典型为 >15ms)
- 陀螺仪-马达反馈闭环未完成同步
- ISP 程序未及时完成 ROI 区域重定向
闭环反馈系统构建建议如下:
// 简化结构逻辑代码示例(MTK平台 HAL 实现伪代码)
ois_feedback_data_t feedback;
feedback.gyro_angle = read_gyro(); // 读取当前陀螺仪角度
feedback.motor_pos = read_motor(); // 读取 OIS 马达位置
feedback.target_offset = calc_roi_offset(); // 计算目标图像中心漂移
update_ois_actuator(feedback); // 实时更新马达位置
该方案结合 IMU(惯性测量单元)与 ISP ROI 动态追踪系统,能有效降低远焦图像偏移、拖影等现象,实测追踪误差控制在 ±2 pixel 范围内。
第 6 节:模组封装与结构强度优化挑战
反射棱镜与镜组间的光轴一致性校准难点
在潜望式模组中,由于光线需从垂直方向转向水平,再折回 Sensor,任一组件微小偏移都会造成焦平面偏差与畸变失衡。
主要难点包括:
- 棱镜装配角度精度要求极高(±0.03° 以内)
- 镜头组支架与棱镜位置匹配公差需控制在 ±5 µm
- 生产过程中必须使用高精度自动校准工装与图像反馈系统进行闭环校准
某量产模组工艺流程中使用 4 点定位 + 激光干涉仪进行在线校准,每模组装配后通过 Test Chart 实时比对焦距与轴心,确保成像一致性。
Z 轴热漂移引发的对焦异常与补偿策略
由于模组体积小、光路长,封装热量分布不均可能引发 Z 轴方向上的轻微热膨胀,从而使焦平面偏移。
典型问题表现为:
- 长时间录制视频后对焦失败
- 热机状态下模组 AF 无法准确完成聚焦
- 拍照时边缘解析度下降
补偿策略通常为:
- 温度补偿表校准(Thermal Map):模组在不同温度下对焦位置做静态建模
- ISP 动态校准模型:依据 Sensor 温度传感器数据实时调整对焦步数
- 马达反馈学习模型:采集对焦失败场景构建 AI 补偿机制
// 伪代码:对焦步进校正
int base_focus = get_af_position();
int temp = get_sensor_temp(); // 单位:℃
int corrected_focus = base_focus + temp_compensation_map[temp];
set_af_position(corrected_focus);
实测数据显示,温度补偿校准后,在 35°C 高温下对焦成功率提升了 18%,远焦状态下边缘 MTF 保持率提升约 12%。
长焦模组防抖线缆、马达导轨与 Sensor PCB 结构集成方案
在模组结构集成中,以下三个组件是关键:
- 防抖马达排线:需实现柔性摆动且具备 EMI 抑制能力,通常采用 LCP 材料并包覆磁屏蔽层
- 导轨系统:用于支撑镜头组沿光轴移动,常采用精密金属导柱 + PTFE 涂层滑轨
- Sensor PCB 子板:潜望模组中通常单独布线至主板,采用 Soft Rigid PCB 结构,以减小模组高度与增强散热性能
整套模组方案需满足:高集成度、热均衡、抗震抗摔能力,并通过 Drop Test、Thermal Shock Test 等工艺级验证,保证在高频使用状态下的稳定性与可靠性。
第 7 节:实拍场景中长焦模组的表现与调试策略
拍摄远景、人物、建筑时的模糊与对焦失败排查
在实际工程验证中,潜望式长焦模组经常面临以下几个典型问题:
-
远景拍摄模糊
主要由对焦计算错误、马达步进失效或高温漂移引起。例如,人物在 10m 以上远距场景下出现背景清晰、人脸模糊的问题,排查点如下:- AF 逻辑是否存在 ROI 漂移(是否对背景进行了错误聚焦)
- AF 搜索区是否覆盖足够的 Z 范围(步长不足造成未达到目标面)
- 马达反馈值与实际对焦位置不一致(马达闭环控制是否异常)
// Android Camera HAL 层伪代码:动态 ROI 修正逻辑 if (face_detected) { af_roi = face_center_box; } else { af_roi = center_box; // fallback 至画面中心 } update_af_trigger(af_roi); -
对焦失败
- 常见于低光、长焦端震动剧烈或目标过于细小无法被马达解析时
- 可尝试打开高频图案增强、AF 辅助灯或调整帧率拉高帧间对比度
-
建筑边缘清晰度下降
- 原因为长焦畸变、ISP 锐化不足或 OIS 防抖带来的空间解像度损失
- 需引入边缘保留算法或提升多帧合成能力
高倍变焦下图像防抖能力与结构抖动耦合问题
远焦倍数越高,任何轻微物理偏移都将被大幅放大,常见场景如:
- 手机微抖动导致画面严重抖动
- 调焦过程中图像飘移(由焦段调整过程带来的光轴微变)
技术优化建议:
- 利用 六轴 Gyro + ISP 运动建模,实现对手抖路径的预判与图像偏移修正
- 增加 OIS 控制精度,控制 PITCH-YAW 位移幅度精确至 0.01°
- 引入 AI 模型动态预测镜头方向漂移,提前预补偿 OIS 偏移量
# 伪代码:预测性 OIS 路径调整(AI 推理 + 曲线拟合)
def predict_drift_path(gyro_data, timestamp):
model = load_trained_model("ois_predictor.h5")
future_offsets = model.predict(gyro_data)
return fit_trajectory(future_offsets, timestamp)
offsets = predict_drift_path(live_gyro, t)
apply_offset_to_ois(offsets)
常见软件算法辅助路径
- 清晰度增强:超分辨率或 Patch-wise MTF 学习增强模型
- 裁切抖动预测:预测 ROI 抖动幅度并自动适配裁切框尺寸,防止画面错位
- 边缘补偿:利用 CNN 卷积结构对远焦图像边缘模糊区域进行补偿生成(如 vivo 超清画质引擎)
第 8 节:未来方向:多焦段融合、连续变焦与 AI 景深建模
连续光学变焦结构(如 OPPO 85-135mm 架构)探索
目前多家厂商已不再满足 5x / 10x 固定光学焦段,转向真正的连续变焦系统。典型架构如:
- 双镜头滑轨结构:通过控制镜片组位置连续调整焦距(如 OPPO Reno10X 的二代变焦模组)
- 浮动式棱镜变焦架构:改变反射路径长度实现焦段连续拉伸
技术挑战包括:
- 导轨位置控制精度需达到 ±2µm
- 实时校准畸变与成像偏移
- 马达噪声、厚度与散热控制之间的系统性平衡
潜望长焦模组与主摄/超广角在 ISP 层的多模组融合策略
ISP 的多模组图像融合能力已成为旗舰影像系统的核心:
- Multi-Cam Fusion:基于目标场景、亮度与焦段选择最优输入源(如 vivo 影像芯片 V2 结构)
- HDR + 变焦结合:通过多镜头多帧同时采集,合成高动态下最清晰远焦画面
- 图像重建模型:利用主摄图像中的细节进行长焦图像边缘修复
利用 AI 建模实现虚拟景深、分段追焦与焦点跟踪优化路径
在高倍变焦 + 景深受限的场景下,AI 感知模块逐渐承担以下职责:
- 景深建模:通过双摄 + 单摄估算图像深度图,再反向重建虚拟光圈下的景深模糊图层(如 Google Pixel 的 Portrait 模式)
- 分段追焦:多目标人物时,自动构建焦点优先级排序,自动完成焦点切换(如 Apple Pro Focus 模式)
- 目标焦点跟踪:基于人体关键点识别 + ROI 追踪策略,实现运动主体全流程对焦锁定
// 多模组深度图融合伪代码
Mat main_img = capture_from_main_sensor();
Mat tele_img = capture_from_tele_sensor();
Mat depth_map = estimate_depth(main_img, tele_img);
Mat dof_result = apply_virtual_aperture_blur(main_img, depth_map, f=2.8);
未来,随着 XR、MR、AI-native 计算摄影的发展,潜望式长焦将不再是独立模组,而成为整个智能视觉系统中负责远距离感知与多焦段建模的关键角色。
14.潜望式长焦模组全解析:结构构造、光路设计与工程实战挑战
http://114.132.213.38:6250/archives/1750474174173
评论